In this post, you’ll learn what is AC motors and types of AC motors, working principle, construction, applications, advantages and disadvantages.
A.C. Motors and Types
The motor which converts an alternating current into mechanical energy is known us air A.C. motor. Induction motors are the A.C. motors.

Working Principle of AC Motors
Induction motor works on the principle that whenever a closed conductor is placed in a magnetic field, it produces a torque or induction motor works on the combined effect of electromagnetic induction and motor principle.
Read also: What is Bearing? and Different Types of Bearings and How Bearing Works?
Construction of AC Motors
The 3-phase induction motor mainly consists of two parts:
- Stator
- Rotor
The stator is a static part and rotor is a rotating part, both are separated by a small air gap, which varies from 0.4 mm – 4 mm depending on the rating of the motor.
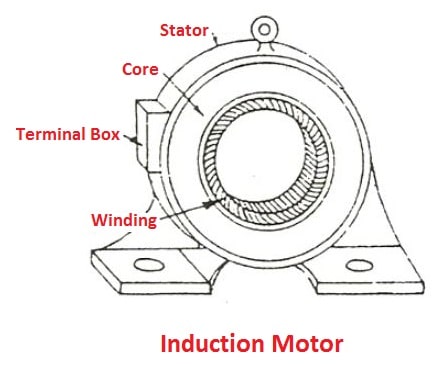
1. Stator
The figure shows the stator of the induction motor. It consists of a steel frame, which encloses a hollow, cylindrical cone, made up of thin laminations of silicon steel to reduce eddy current loss and hysteresis loss. A large number of identical slots are cut on the inner periphery of the core.

The stator conductors are placed in these slots, which are insulated from each other and also from the slots. The conductors are connected as a balanced star or delta winding. The windings are wound for a definite no. of poles, depending on the requirement of speed.
If high speed needed, the winding is wound for less no. of poles and vice-versa. The relation between speed and no. of poles is given by,
Ns=120f/P
where,
- Ns = Synchronous speed in rpm
- f = Frequency of the supply
- P = Number of poles.
Read also: Inductors: Types, Specifications, Working and Application of Inductors
2. Rotor
The rotor is mounted on the shaft of the motor to which, any mechanical load can be connected. There are 2 types of rotors such as:
- Squirrel cage rotor
- Phase wound rotor
Thus if the motor contains a squirrel cage rotor, then it is named as squirrel cage induction motor and if it contains a phase wound rotor, then it is named as phase wound induction motor.
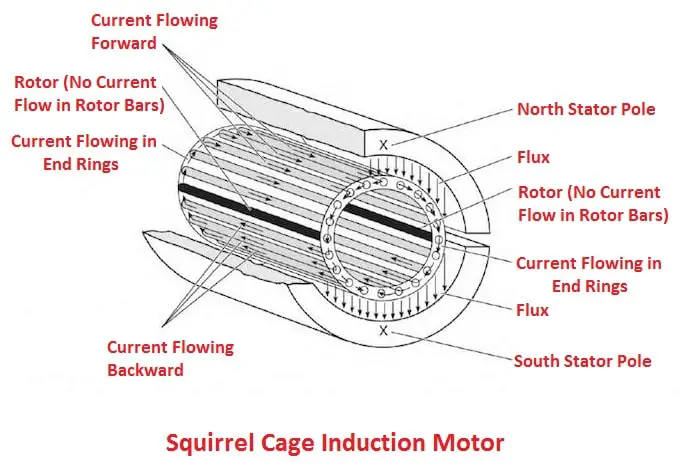
1. Squirrel Cage Rotor
The figure shows the squirrel cage rotor, which consists of a cylindrical laminated core with parallel slots, for carrying rotor conductors. The conductors of the rotor are heavy copper or aluminium bars. One bar is placed in each slot.

All the bars are brazed or welded at both ends to two copper end rings, thus short-circuiting them at both ends. As the rotor bars are short-circuited, it is impossible to add external resistance in series with the rotor circuit during starting.
The slots are slightly skewed because it reduces the noise due to magnetic hum and makes the rotor to run smoothly and it also reduces the locking tendency between the rotor and the stator.
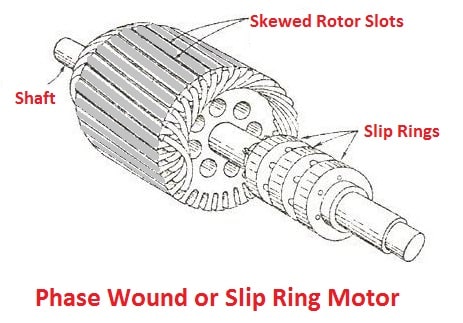
2. Phase Wound Rotor
The figure shows the phase wound induction motor along with the rotor connections stance The rotor is laminated. The cylindrical core contains uniform slots three-phase star-connected winding is placed in these slots.

The open ends of star winding are connected to 3 insulated slip rings, mounted on the shaft of the motor, with carbon brushes connected to them. The three brushes are connected to 3 phase star connected rheostat, which is used as a startor during the starting period. The slip rings are short-circuited by means of a metal collar during the running condition.
Read also: Electric Circuit: Types of circuits, Kirchhoff’s Law and Its Classification
Types of AC Motors

Following are the different types of AC motors:
- Induction motors
- Synchronous motors
- Single-phase motors
- Three-phase motors
- Squirrel cage induction motor
- Phase wound motor or wound motor or slip-ring motor
1. Induction Motors
An induction motor (also known as an asynchronous motor) is a commonly employed as AC electric motor. In this motor, the electric current in the rotor required to produce torque is achieved through electromagnetic induction from the rotating magnetic field of the stator winding. The rotor of the induction motor is basically a squirrel cage rotor or wound type rotor.
Working Principle
In a DC motor, the electric supply gives both to the stator and the other to the rotor through a brush arrangement. In an induction motor, we only supply one to the stator. When we give the electric supply to the stator winding, a magnetic flux is produced in the stator due to the current flowing in the coil.
The rotor winding is so designed that each coil is short-circuited. The magnetic flux from the stator cuts the short-circulated coil in the rotor. As the rotor coils are short-circuited, the current will start flowing through the coil of the rotor. This is called Faraday’s law of electromagnetic induction.
When current flows through the rotor coil, another magnetic flux is generated in the rotor. There are now two fluxes in stator and rotor. The rotor flux will lag behind with respect to the stator flux. Due to that, the rotor will get the torque that will make the rotor to rotate in the direction of the rotating magnetic field.
2. Synchronous Motors
The synchronous motor states that “An AC motor in which, it is at steady-state the rotation of a shaft is in sync with the frequency of the applied current”. It works as an AC motor but here the total number of turns formed by the shaft is equal to the integer multiplier of the frequency of the applied current.
The synchronous motor does not depend on the induction current to work. In these types of motors, unlike induction motors, multiphase AC electromagnets exist on the stator, which produces a rotating magnetic field.
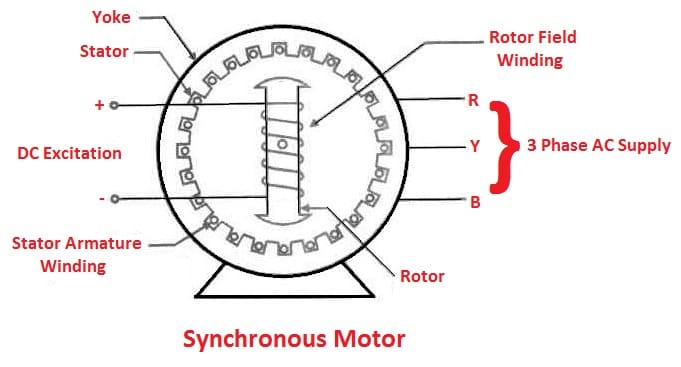
Here the rotor is a permanent magnet that is synchronized with the rotating magnetic field and rotates synchronously with the frequency of the current applied to it.
Working Principle
The working of synchronous motors depends on the interaction of the stator magnetic field with the magnetic field of the rotor. The stator has 3 phase windings and is supplied with 3 phase power.
Hence, the stator winding produces a 3-phase rotating magnetic field. The rotor is supplied with a DC supply. The rotor enters the rotating magnetic field generated by the stator winding and rotates in synchronization.
Now, the speed of the motor depends on the frequency of supply current. The synchronous motor speed is controlled by the frequency of the current applied. The speed of a synchronous motor is calculated by
Ns=60f/P=120f/p
where,
- f = be the frequency of the AC current (Hz)
- p = be the total number of poles per phase
- P = be the total pair number of poles per phase
If a load greater than the breakdown load is applied, then the motor becomes desynchronized. The 3 phase stator winding has the advantage of determining the direction of winding.
In the case of single-phase winding, it is not possible to obtain the direction of rotation and the motor can start in either direction. These synchronous motors require initial arrangement to control the direction of rotation.
3. Single-Phase Motors
A single-phase induction motor is an AC motor, that converts the electrical energy into mechanical energy to perform some physical work. The single-phase induction motor requires only one power phase for its operation. This types of ac motors are commonly used in low power applications in domestic and industrial purposes.
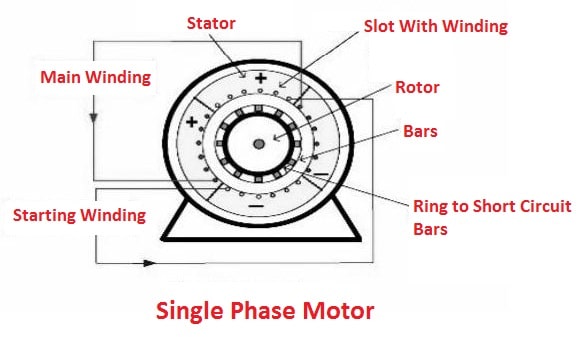
Working Principle
In these types of ac motors, a single-phase AC supply is provided to the stator winding. This causes a magnetic field that pulses in a sinusoidal manner.
After some time the field polarity reverses and the alternating current may not provide the required winding to the motor. But if the motor is driven by external means, the motor will rotate with limited speed.
4. Three-Phase Motors
A three-phase motor is a type of electric motor, that converts electrical energy into mechanical energy by electromagnetic interactions. In the case of a three-phase AC (alternating current) operation, the most commonly used motor is a 3 phase induction motor, as these types of ac motors do not require additional starting devices.
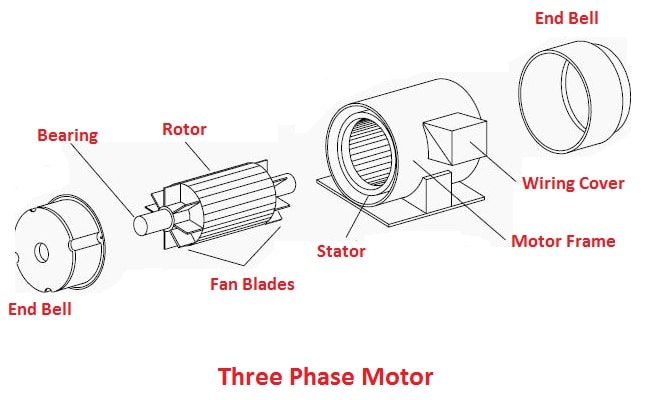
These types of motors are called as self-starting induction motors. A three-phase induction motor consists of a stator and rotor.
Working Principle
When these types of ac motors are charged by a three-phase supply, the stator winding produces a constant magnetic field with 120 displacements in a constant magnitude that revolves at synchronous speed.
According to Faraday’s theory of electromagnetic field rules, the variable magnetic field cuts the rotor conductors and generates a current in them. As these rotor conductors are shortened, current begins to flow through these conductors.
In the presence of a stator magnetic field, rotor conductors are placed. Therefore, according to Lorenz force theory, a mechanical force acts on the rotor conductor. Thus, all rotor conductors exert force, that is, the sum of mechanical forces produces torque in the rotor that moves it in the same direction as the rotating magnetic field.
The rotation of this rotor conductor can also be explained by Lenz’s law which states that the currents induced in the rotor oppose the cause of its production, here this resistance is rotating the magnetic field.
As a result, the rotor starts rotating in the same direction of the stator rotating magnetic field. If the rotor speed is greater than the stator speed, then no current will be generated in the rotor because the reason for the rotor rotating is the relative motion of the rotor and the stator magnetic field.
The difference between stator and rotor fields is known as slip. The 3-phase motor is called asynchronous machine due to this relative speed difference between the stator and rotor.
5. Squirrel Cage Induction Motor
A squirrel cage induction motor is a type of three-phase induction motor based on the law of electromagnetism. This is called the ‘squirrel cage motor’ because the rotor inside it known as squirrel cage rotor ‘- because it looks like a squirrel cage.
This rotor is a cylinder of steel piece whose surface consists of highly conductive metal (usually aluminium or copper). When an alternating current move through the stator windings, a rotating magnetic field is generated.
This produces a current in the rotor winding, which generates its own magnetic field. The interaction of magnetic fields generated by the stator and rotor winding produces a torque on the squirrel cage rotor.
A major advantage of a squirrel cage motor is how efficiently you can change its speed-torque characteristics. This can be achieved by adjusting the size of the bars in the rotor. This types of motors are used in various industries because they are reliable, self-starting, and easy to adapt.
Working Principle
When the stator winding is given a 3 phase supply it establishes a rotating magnetic field in space. This rotating magnetic field has a speed known as synchronous speed.
This rotating magnetic field of stator induces voltages in the rotor bars and therefore short-circuit currents in the rotor bars begin to flow. These rotor currents produce their own self-magnetic field which will combine with the field of the stator. Now the rotor field will try to resist its cause, and so the rotor starts to follow the rotating magnetic field.
The moment the rotor catches the rotating magnetic field the rotor current drops to zero because there is no greater relative motion between the rotating magnetic field and the rotor. Therefore, at that time the rotor experiences zero tangential force so the rotor disintegrates momentarily.
After the disintegration of the rotor, the relative motion between the rotor and the rotating magnetic field reestablishes hence the rotor current being re-induced.
So again, the tangential force is restored to the rotation of the rotor, and so again the rotor starts rotating the magnetic field, and as such, the rotor keeps a constant speed which is less than the speed of rotating magnetic field or synchronous speed.
6. Phase Wound Motor or Slip-Ring Motor
The induction motors have been managing the industrial world for many years. In induction motors used in elevators and hoists, you can see a type of rotor, called a slip ring rotor, while in most other applications you can see a simple, squirrel cage type rotor.
The common induction motor, or squirrel-cage type motor, generates very low starting torque, and for some applications, this low starting torque will cause heavy problems. It is under these conditions that slip ring induction motors are used, as they provide high starting torque.
Advantages of AC Motors
Following are the advantages of AC motor:
- It can be available at low cost.
- It has speed variations.
- Low maintenance cost.
- AC Motor has high power factor.
- It has reliable operations.
- Simple in design.
Disadvantages of AC Motors
Following are the disadvantages of AC motor:
- It will create eddy currents due to the production of a back EMF.
- Disability to operate at low speed.
- It has poor positioning control.
Applications of AC Motors
The following are the applications of AC motors:
- Squirrel Cage Motors
- These are used in industrial drives of water pumps, tube wells, lathes, drills etc.
- Double cage motors are used for drives of cranes, punch presses, lathes, drills etc.
- Phase wound motors
- Used where high starting torque is required.
- Used for drives of line shafts, lifts, pumps, mills etc.
- Synchronous motors are used in compressors, paper mills, steel rolling industry.
- Single-phase motors are used in domestic electrical appliances like washing machines refrigerators, grinders, blowers etc.
Download Pdf of this article

That’s it thanks for reading. If you like our article on “Types of AC Motors” please share with your friends. If you have any question about “Types of AC Motors” you can ask in the comments.
Read next:
Hi, can I please get the PDF🙏.
The PDF file has been sent to your inbox.
Please can i get pdf in details and refferences
The PDF file has been sent to your inbox.
Please. I would like to have the PDF too.
The PDF file has been sent to your inbox.
Send me pdf please
The PDF file has been sent to your inbox.
Please sent me the PDF link
The PDF file has been sent to your inbox.
i need pdf file
The PDF file has been sent to your inbox.
I need pdf file
The PDF file has been sent to your inbox.
Plz kindly email me this
The PDF file has been sent to your inbox.
Assalam o alaikum sir can you send me pdf this file plz
The PDF file has been sent to your inbox.
Kindly send the PDF in my email
The PDF file has been sent to your inbox.
Please send a pdf file
The PDF file has been sent to your inbox.
Send me pdf of a star delta
The PDF file has been sent to your inbox.
Please send me the pdf of capacitor
The PDF file has been sent to your inbox.
Please I need the pdfs
The PDF file has been sent to your inbox.
Thank you with the understandable explanation .Can l have a pdf
You’re welcome. The PDF file has been sent to your inbox.
Hi, can you send me the PDF file, thanks.
The PDF file has been sent to your inbox.
I want some pdfs
The PDF file has been sent to your inbox.
Please send me the pdf file
The PDF file has been sent to your inbox.
This is so awesome, i want to be a technician of rewinding motor this lesson is so helpful
I’m glad it was helpful for you. You’re welcome.
Please send the pdf
The PDF file has been sent to your inbox.
Plz send me pdf
The PDF file has been sent to your inbox.
Please send the pdf
The PDF file has been sent to your inbox.
Please send me PDF copy.
Thank you
You’re welcome. The PDF file has been sent to your inbox.
Thank you for this great explanation. Please i would also love to receive the pdf. My email adress is [email protected]
You’re welcome. The PDF file has been sent to your inbox.
I would like you to send me the PDF copy of the material. It’s quite educative and interesting to read.
Thanks for your feedback. The PDF file has been sent to your inbox.
Please help me with the pdf
The PDF file has been sent to your inbox.
Thank you very much for meaningful discussion on this topic (A C/DC MOTORS).
Please I need the pdf thank you once again,I am an skill AUTOMOTIVE Engineer.
You’re welcome. The PDF file has been sent to your inbox.
Good experience i got by reading…
I’m glad it was helpful for you.
I just finished studying the PDF you sent to me, I will appreciate if you can forward this to me in PDF format. Thanks
The PDF file has been sent to your inbox.
This is a good article, I appreciate this work. Keep it up.
Thanks for reading. Sure we’ll do.
Please send me PDF copy.
Many thanks!
You’re welcome. The PDF file has been sent to your inbox.
Plz send me the PDF
The PDF file has been sent to your inbox.
Can I ask Pdf dor this. Thank you
You’re welcome. The PDF file has been sent to your inbox.
Kindly send me. pdf copy thanks
The PDF file has been sent to your inbox.
Thank you so much for this educative information. I would like to send me the pdf of this document.
You’re welcome. The PDF file has been sent to your inbox.
Please send me the PDF copy
The PDF file has been sent to your inbox.
Send me sir is good job I want to aprciat u
Thank you. The PDF file has been sent to your inbox.
I have really enjoyed it, please how can I contact you for more. Thanks
You’re welcome. You can stay tuned with us by subscribing to our newsletter.