In this article, you’ll learn what is DC motor? How does it work? and different types of DC motors explained with parts, construction detail, applications, and more.
You can also download the PDF file of this article at the end.
DC Motors and Types
What is a DC motor?
An electrical motor is a machine that mainly converts electrical energy into mechanical energy. A DC motor is an electrical machine that converts mechanical energy into direct current and vice-versa.

Direct current (DC) motors are widely used in today’s manufacturing industries. Due to their extensive functionality, DC motors are frequently used in small and medium-sized motoring applications, including robotics and automobiles.
There are various types of DC motors suitable for various tasks across the manufacturing industry because DC motors are used in such a wide range of applications.
You might want to read this: 12 Basic Parts of DC Generator & Their Functions [PDF]
Working of DC Motor
How does DC Motor Works?
Consider a part of a multipolar DC motor, as shown in the figure. When the main supply is applied to the armature conductors and field magnets are excited, the conductors experience a force that tends to rotate the armature.
Armature conductors under N-pole are assumed to carry current downwards, and the S-poles carry upwards. Now by applying Fleming’s Left-hand rule, the direction of the force on each conductor can be found. This is shown by small arrow marks in the figure in each conductor.

The force ‘F’ experienced by each conductor tends to rotate the armature in the anti-clockwise direction. The continuous and unidirectional torque is developed by a commutator which reverses the current in each conductor as it passes from one pole to another.
Read also: A.C Motors: Types, Working, Construction, Applications and More
Working Principle of DC Motor
The operation of D.C. The motor is based on the working principle that when a current-carrying conductor is located in a magnetic field, it undergoes a mechanical force, guided by Fleming’s left-hand rule and whose magnitude is given by:
F = BIl newtons.
Where,
- B = Flux density in cub/m²
- I = Current through the conductor in amperes.
- l = Length of the conductor in meters.
Read also: Resistors: Types of Resistor and Their Symbols, and Selection of Resistors
Constructional and Parts of DC Motor
The construction of the D.C. motor is the same as D.C. Generator.

Following are the parts of a DC motor:
- Yoke or frame
- Field poles
- Field winding
- Brushes
- End shields
- Armature core
- Armature winding
- Commutator
- Shaft
1) Yoke or Frame: It is a stationary part called a starter. The functions of Yoke are:
- It supports the field poles and field winding.
- Provides a magnetic path to the main field flux.
- Protects armature from mechanical injury.
2) Field Poles: The main functions of poles are :
- Provides support to the field winding.
- Provide a slow reactance path to the main field flux.
- Distributes the main field flux uniformly all around the periphery of the armature.
3) Field Windings: They produce a magnetic field when D.C. is passed through them.
4) Brushes: They receive D.C. from the main and supply it to the armature winding through a commutator.
5) End Shields: The main functions are:
- Supports the bearings in which the armature rotates.
- It covers the armature and protects it.
6) Armature Core: It houses the windings in the slot and provides a low reactance path to the main field flux and the armature flux.
7) Armature Windings: It produces armature flux when current is passed through them. This flux reacts with the main field flux and produces rotation or torque.
8) Commutator: It collects D.C. from brushes, converts it into A.C., and supplies it to the armature windings.
9) Shaft: The main functions are :
- It provides support to the armature, windings, and commutator.
- It helps the armature to rotate.
Checkout this article: What Are The Fundamental Parts of Transformer?
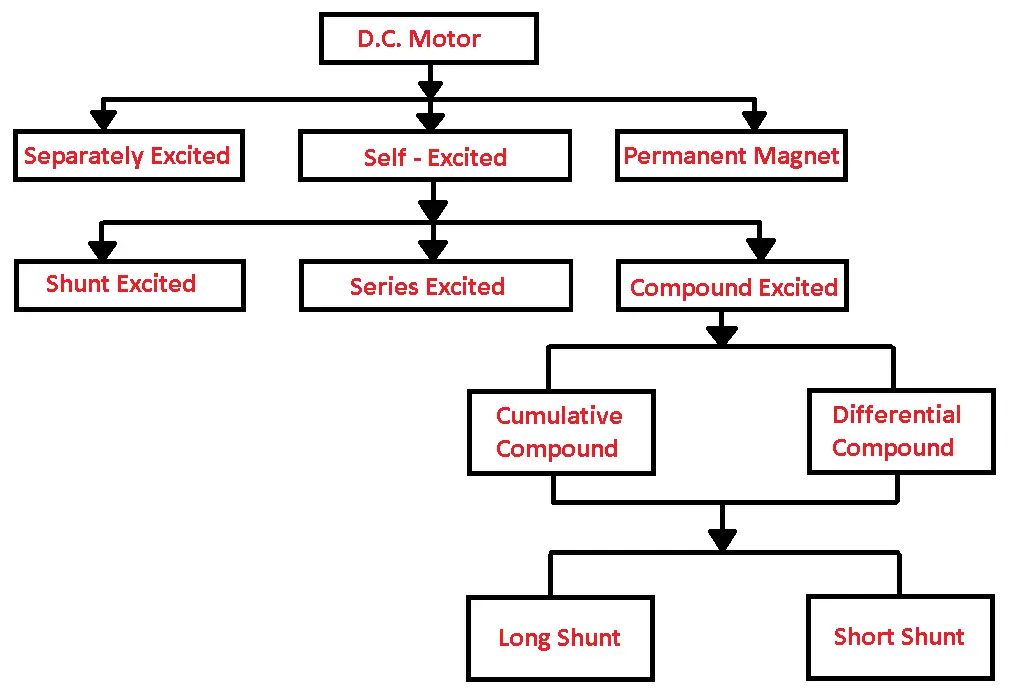
Types of DC Motors
Following are the three main types of DC motors:
- Separately excited dc motor
- Permanent magnet dc motor
- Self excited dc motor
- Shunt-wound dc motors
- Series wound dc motors
- Compound wound dc motors
- Cumulative compound DC motor
- Differential compound DC motor
- Short shunt DC motor
- Long shunt DC motor
#1 Separately Excited DC Motor
In this type of dc motor, the electrical supply is given separately to the field and armature winding. In this, the armature current does not flow through the field winding, as the field winding is powered by a separate external source of DC current.
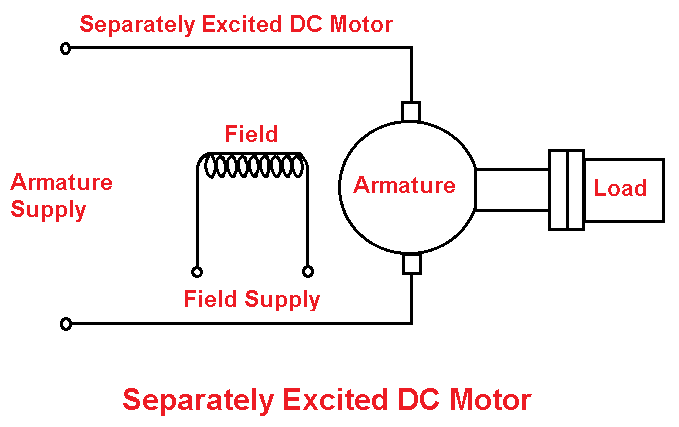
So from the torque equation of the dc motor, we get
Tg = Ka φ Ia
In this case, the torque is varied by varying field flux φ, and it is independent of the armature current Ia.
#2 Permanent Magnet DC Motor
A permanent magnet DC motor has armature winding like a usual motor, but it does not have field winding. In this type of dc motor, the radially magnetized permanent magnets are placed inside the stator core to generate flux. At the same time, the rotor consists of a conventional DC armature with a commutator segment and brushes.
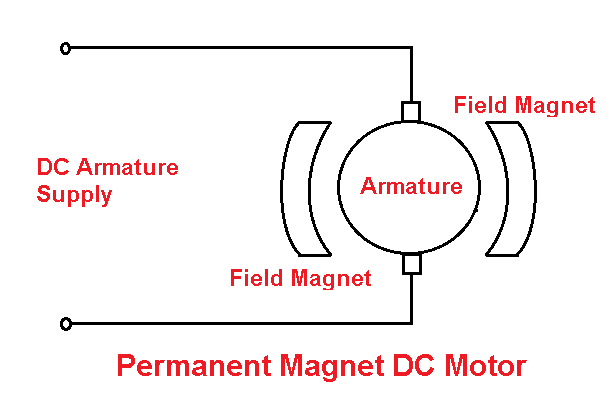
By applying the torque equation of the DC motor,
Tg = Ka φ Ia
The value of φ is constant because permanent magnets of the required flux density are selected at the time of manufacture and cannot be changed thereafter.
For permanent magnet DC motor,
Tg = Ka1 Ia
Where Ka1 = Ka.φ is constant.
In this case, the torque of the DC motor can be adjusted by controlling the armature supply.
Read Also: Different Types of Essential Electrician Tools [Names & Uses]
#3 Self-excited DC Motor
In a self-excited type DC motor, the field winding is connected in series or in parallel, partly in series or partly in parallel with the armature winding. Self-excited DC motors are then divided into three types:
These types of dc motors are characterized by the connection of field winding in relation to the armature namely.
- Shunt-wound motor: in which field winding is connected in parallel with the armature.
- Series wound motor: in which the field winding of the motor is connected in series with the armature.
- Compound wound motor: which has two field windings: one connected in parallel with the armature and the other in series with it.
#4 Shunt Wound Motor
A DC shunt motor (also known as a shunt wound DC motor) is a type of self-excited DC motor, where field winding is shaken or connected parallel to the armature winding of the motor. Because they are connected in parallel, the armature and field winding are exposed to the same supply voltage.
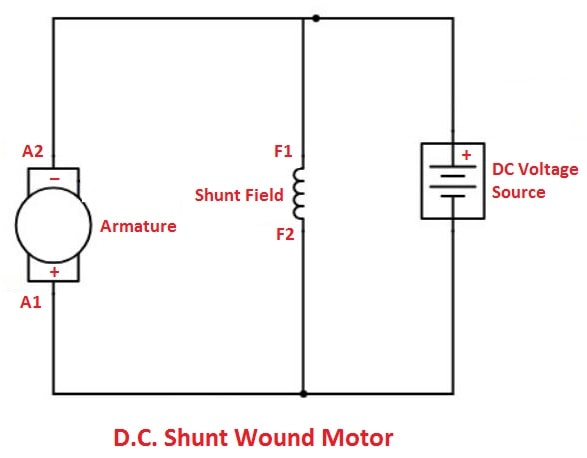
But, there are separate branches for the flow of armature current and field current, as shown in the figure above.
Construction and Working Principles
The construction of a DC shunt motor is similar to other types of DC motors, as shown in the figure. This motor can consist of basic parts such as field windings (stator), a commutator, and an armature (rotor).
The working principle of a DC shunt motor is whenever a DC motor is turned ON. Suddenly, DC flows across the entire stator as well as the rotor. This current flow will create two fields, particularly the pole as well as the armature.
In the air distance between the armature and the field shoes, there are two magnetic fields, and they will react with each other to rotate the armature. The commutator reverses the current flow direction of the armature at ordinary intervals.
Therefore the armature field, as opposed to the pole field at all times, keeps rotating the armature in an equal direction.
Advantages of DC Shunt Wound Motor
The following are the advantages of a shunt-wound motor:
- DC shunt motors can be used for heavy industrial applications where torque and speed are a wide range.
- A shunt-wound motor capable of running at a predetermined speed.
- The power supply of a DC motor is inexpensive.
Disadvantages of DC Shunt Wound Motor
The following are the disadvantages of shunt-wound motor:
- Installation of DC shunt-wound motors is expensive compared with other types of motors.
- Because shunt motors are constant-speed motors, this would be a disadvantage where it is necessary to operate under variable speeds.
- The shunt-wound motors are inaccurate in low-speed operation.
Read Also: Different Types of Insulators: Their Working and Applications
#5 Series Wound Motor
A DC series motor is similar to any other motor because the main function of this motor is to convert electrical energy into mechanical energy. The operation of the series motor essentially depends on the electromagnetic principle.
Whenever the magnetic field is approximately formed, a current-carrying conductor cooperates with the external magnetic field, and then a rotating motion can be produced.
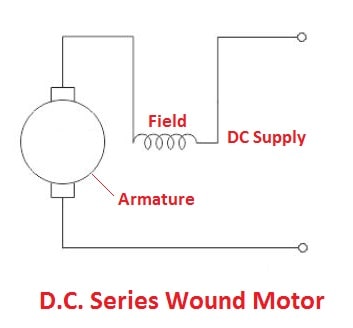
Construction of D.C. Series Motor
The D.C series motor is consists of a rotor (armature), commutator, stator, axle, field windings, and brushes. The fixed component of the motor is the stator and is constructed with two or more electromagnet pole parts.
The rotor consists of the armature and windings at the associated core for the armature. The power source in the brush array associated with the commutator can be connected to the armature winding.
The rotor includes a central axle for rotating, and due to a large amount of current in the entire winding the field winding should be able to hold the higher current, the larger will be the torque produced with the motor.
Working Principle of D.C. Series Motor
An external voltage source is applied in a series configuration of field winding and armature. So one end of the voltage source is attached to the winding and the other end is attached to the armature through the brush.
Initially at the motor starts with a voltage source attached to the motor, it forms a large amount of current because both the winding and the armature of the motor are made up of large conductors, providing minimal resistance to the current path. The large current through the winding produces a strong magnetic field.
This strong magnetic field gives high torque to the armature shaft, thus exerting the spinning action of the armature. Hence the motor starts rotating at its maximum speed in the beginning. A rotating armature in the presence of a magnetic field occurs in a counter EMF, limiting the current build-up in a series combination of armature and winding.
Thus the series motors will offer maximum speed and torque once started but with increasing speed gradually, its torque will come down due to its low current. In practice, this is required from motors. Due to the high torque provided by the armature, the load on the shaft is initially set to rotate.
Consequently, the low torque will drive the load forward. This further helps to increase the heat dissipation of the motor. But, the amount of torque generated by the motor is directly proportional to the winding current.
Advantages of DC Series Wound Motor
The following are the advantages of a series wound motor:
- The starting torque of a DC series motor is relatively high compared to other motors, so such motors are widely used for traction applications.
- It can be used for AC or DC supply; therefore, it is also known as a universal motor.
- A Shunt motor develops more power for the same construction size than a DC shunt motor.
Disadvantages of DC Series Wound Motors
The following are the disadvantages of a series wound motor:
- The speed control and regulation of the DC series motor are not good enough.
- DC series motors need to be loaded before starting. Therefore the DC series motors are not good to use, where the load is not applied in the initial stage.
Read Also: 9 Different Types of Batteries & Their Applications
#6 Compound Wound Motor
A compound wound DC motor is a type of self-excited motor and consists of both series of field coils and shunt field coils attached to the armature winding. Both field coils provide for the expected amount of magnetic flux, which links with the armature coil and delivers about the torque required to facilitate rotation at the desired speed.
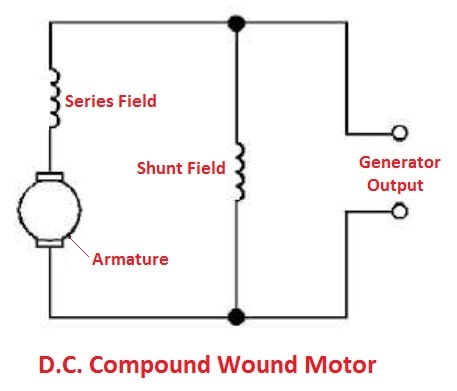
As we know, a compound wound motor is basically formed by the amalgamation of a shunt wound DC motor and a series wound DC motor to obtain better closure properties of both these types.
Like a shunt wound, a DC motor is offered with a highly efficient speed regulation characteristic, while a DC series motor has high starting torque. So the compound wound DC motor makes a compromise in terms of both these characteristics and has a good combination of proper speed regulation and high starting torque.
However, its initial torque is not as high as in the case of a DC motor, nor is its speed regulation as good as a DC shunt motor. The overall characteristics of a DC shunt motor come in between these two extreme limits.
Advantages of DC Compound Wound Motor
The following are the advantages of a compound wound motor:
- The motor can quickly start and stop.
- The reversing and acceleration of the motor can do fast.
Disadvantages of DC Compound Wound Motor
The following are the disadvantages of a compound wound motor:
- The operation and maintenance costs of compound wound motors are expensive.
- DC motors cannot operate in a dangerous situation where there is a spark in the brush of the motor.
The compound DC motor can be classified into two types according to the nature of compounding.
Read Also: What Are Circuit Breakers? Their Types, Working & Applications
#7 Cumulative Compound DC Motor
If the shunt field flux assists, the main field flux, which is produced by the main field connected in series to the armature winding, is called a cumulative compound DC motor.
#8 Differential Compound DC motor
If the shunt and series winding are arranged so that the field flux generated by the shunt field winding reduces the effect of flux by the main series field winding, then it is called a differential compound DC motor.
Both types of compound DC motors can be of short or long shut type according to the nature of the arrangement.
You may like this: Working Principle of Servo Motor: Diagram, Types, Applications
#9 Short Shunt DC Motor
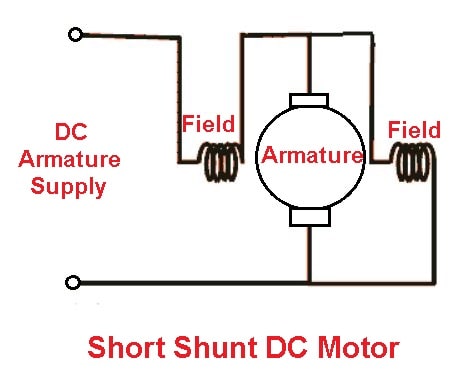
When the shunt field winding of the motor is connected in parallel to the armature winding, it is known as a short shunt DC motor. The diagrammatic representation of the short shunt motor is shown in the figure above.
#10 Long Shunt DC Motor
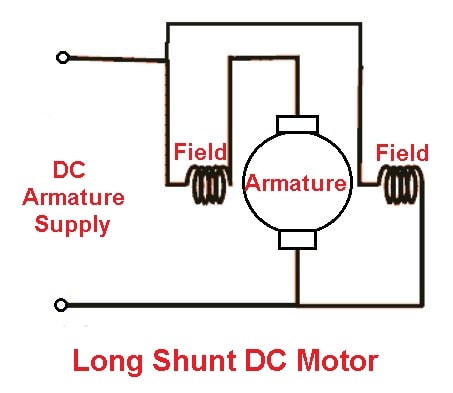
When the shunt field winding of the motor is connected parallel to both armature winding and series field winding, then it is known as a long shunt DC motor. The diagrammatic representation of the long shunt motor is shown in the figure above.
Read Also: Types of Electric Motors: Their Working and Applications
Applications of DC Motors:
- Series motor: It is used where very high starting torque and variable speed are required, such as electrical fraction work, electric locomotives, trolleys, cranes, hoists, and conveyors. Air compressors, vacuum cleaners, hair dryers, sewing machines, etc.
- Shunt motors: It is where constant speed is required with low starting torque, such as for lathes, centrifugal pumps, fans, reciprocating pumps, drilling machines, and boring machines. Spinning and weaving machines etc.
- Compound motor: It is used where sudden loads are applied or removed, such as for shears, punches, coal-cutting machines, elevators, conveyors, heavy planners, rolling mills, ice machines, printing presses, air compressors etc.
That’s it; thanks for reading. If you have any questions about “types of DC motors” ask us in the comments. If you found this article helpful, then please share it with your friends.
Subscribe to our newsletter to get notifications of new articles:
Download the Pdf of this article from here:
Check out the topics listed below as well if you’re interested!
- Capacitors: Types, Definition, Specifications, and Application of Capacitor
- Electric Circuit: Types of circuits, Kirchhoff’s Law and Its Classification
- A.C Motors: Types, Working, Construction, Applications, and More
- 16 Different Types of Transformers and Their Working [Explained]
- What is Resistance Welding? Types, Working, Applications, & Advantages
Good work man, keep it up.
Thanks for your feedback.
Kindly send me something about transformers.
I sent you the PDF file about transformers to your inbox.
please send me pdf coy
Thinks
I just sent you the PDF file to your inbox.
Asking for the PDF dc and ac motor construction and principal of operation
I just sent you the PDF file to your inbox.
ok nice.
Thanks.
DC motor types
1.separately exited motor
2. Permanent magnetic motor
3.dc brush less motor
3.compound motor
Long shunt
Short shunt
We need also this types of motor details if you add this details we have more useful
Thanks for the suggestion I will definitely add these.